| ����|ÿһ̨���˻�����Ҫ������ �������� |
���˻������ڸ߿մ���֪�ϰ�Ϊ������Ƕ��������ռ��ı���һ�С�ֲ�����˻������⣬��Խ�����֣����յȵȵͿ�Ӧ�ó�Ϊ��̬�����ǵ�������ϰ�����ͻأ���������ֵǮ���ܹ������ˡ����Ǵ��СС�����˻������Ƿ���룬����ʼ̸�۱���
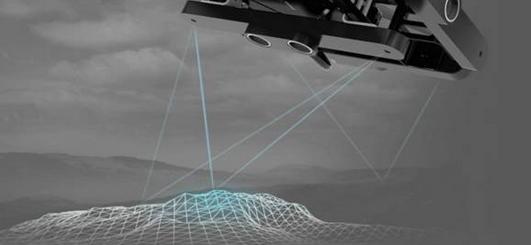
ʲô�DZ��ϣ���˵���Ƕ�ܺ�����������������壬����˫�����ˣ�ע����˫������ô���ϣ�Ҫ����������⣺ 1������Щ���͵��ϰ��� 2����ô��λ�ϰ��� 3����ô��ܡ� ��˵�ϰ������������ͣ����ϰ���С�ϰ������ϰ��� ���ϰ��Dz�����Խ�ı���ǽ��¥��ɽ�ȵȣ����������ϰ�ֻ��ͣ���ܱܡ� С�ϰ��ǵ��߸ˣ���ľ�ȵȿ��Զ�ܵ��ϰ��� ���ϰ�����������ȿ��ƶ�Ŀ�꣬����˵�ɹ���һ��ʯͷ���ðɣ�Ҳ���ǡ� ���ں������ϰ����ֳ��Һ�����ǣ���Ϊ�����������ϣ�֪���ϰ����ڻ�Ҫ֪������λ�ã�����ϰ���Ҫ֪�����Ķ㡣������̽����ƿ�˵������ô����Ҫһϵ�д��������㷨��ϡ� ��������Ϊ���봫������ɨ�贫������˫Ŀ�Ӿ����֡� ���봫����ָ���dz����������ߵ��ࣨ������Ϊ�״�������ࣨ������Ϊ�����״�����Ƕ�������������������Ų��ǰ�����ʣ������ز�ʱ�����ȷ�����룬���������ʺϴ��ϰ���̽�⣬����С�ϰ��Ͷ��ϰ��ĸ�֪��Բ�̫������ȷ�����ҶԲ�ƽ�����ʣ�ֲ�����ͷǹ�����ʣ�ˮ�棩���п��������⡣����С�����˻����ϻ���ڱ��ϲ���ȱ�ݡ� ɨ���ഫ���������ڲ�ഫ�����ϼ�װ��תװ�ã�ͨ����ת����̽�����������ϰ���������Ǽ���ɨ���࣬��ƽ�����ά��������������ǻ�е���������ͳɱ��߰��� ���о���˫Ŀ�Ӿ���ͨ��˫Ŀ��Ƶ�IJ������ÿ����ľ��룬�����۾����ԭ����ͬ������ֻҪ����ͼ�������ӳɱ���ʵ�������������ʵ�õ��豸�� ���ھ��Ǵ��������ܺ��㷨��ƿ���� ��˵˵���ϣ�̽��ϰ������ִ���������ͣ�µ�ָ��滮���Ϻ��������ϡ�ͣ����������Ĵ�����ʽ���滮����������С�ϰ������ַ������ü��ҿɿ��Ըߡ�������������Ҫ�ɻ��й���㷨���ڻ����������ɺ��ߣ���Ҫ�����µ����⣬ ���ۣ�������Ҫ���У������������ϲ��DZ��룬Ҫ�����л����ͷɻ���ֵ��ȷ����
��עciuavexpo��,ɨ���ά��
|
| ��һƪ������|�����ˣ������ÿ��һ����人��¼�� ��һƪ���ճ������˻����֣���Ͷ��Ԯ���� �������� |

��Ȩ���У�2024���ź���������ϵͳ��ҵ��������ί��
��ϵ�ˣ������� �� ��/ �ţ�188-0182-3515
����QQ��761199479 E-mail : 761199479@qq.com