| 看看无人机如何自动保持正常飞行姿态 分享到: |
随着无人机在各个领域越来越广泛,人们对智能飞行的要求也随之提升。因此现在大多数无人机均配备了高度自主的飞行控制系统,以保证飞行过程中的稳定性和安全性,方便用户得到优质的飞行体验。
无人机飞控即无人机的飞行控制系统,被誉为“无人机的大脑”。基石无人机的飞控系统通过调整螺旋桨的转速来调节飞行器起飞、悬停、俯仰、滚转、偏航、降落等动作。其主要组成部分由主控制芯片(CPU)、陀螺仪、加速度计、气压计、磁传感器、GPS模块、SD卡插槽(选装),以及控制电路组成。
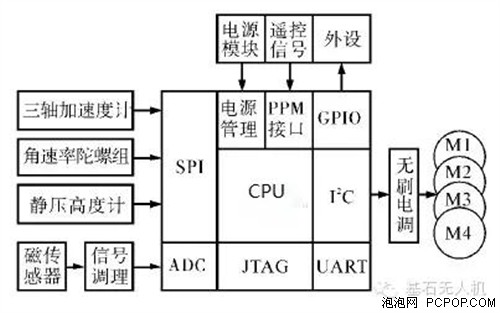
Keyshare基石无人机飞控系统外观图 而飞行控制系统中各个主要组成部分各司其职,实现无人机在安全的飞行高度自动保持正常飞行姿态: 陀螺仪:飞行姿态感知 加速度计测量:相对于机体坐标系的加速度; 磁传感器:测量获取磁偏角; 气压计:主要是获取飞行高度数据; SD卡/内置存储芯片:存取飞行器的飞行数据记录; 主控芯片:传感器的数据最后传送至飞控的主控芯片,经过算法处理后执行相应的飞行控制指令。 Keyshare基石无人机飞行控制器要能够通过采集处理微型惯性器件和三维地磁传感器数据,计算飞行器的姿态角和航向角,并根据飞行指令和任务要求,结合相应的控制律给出适当的控制信号,控制飞行器的执行机构,从而改变飞行器的姿态和位置等,硬件结构图如下图所示:
支持的飞行模式主要包括: 稳定模式 是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选。 定高模式 初次试飞之后就可以尝试定高模式,此模式不需要GPS支持,飞控会根据气压传感器的数据保持当前高度。定高时如果不会定点,因此飞行器依然会漂移。可以遥控来移动或保持位置。 返航模式 返航模式需要GPS定位。GPS在每次起飞前的定位点,就是当前的“家”的位置;GPS如果在起飞前没有定位,在空中首次定位的那个点,就会成为“家”。进入返航模式后,飞行器会升高到15米,或者如果已经高于15米,就保持当前高度,然后飞回“家”。还可以设置高级参数选择到“家”后是否自主降落,和悬停多少秒之后自动降落。 自动模式 此模式下飞行器会自动执行地面站设定好的任务,例如起飞、按顺序飞向多个航点、旋转、拍照等。 绕圈模式 当切入绕圈模式时,飞行器会以当前位置为圆心绕圈飞行。而且此时机头会不受遥控器方向舵的控制,始终指向圆心。如果遥控器给出横滚和俯仰方向上的指令,将会移动圆心。与定高模式相同,可以通过油门来调整飞行器高度,但是不能降落。圆的半径可以通过高级参数设置调整。 |
| 上一篇:美国一团队计划研发 可追踪气象变化的无人 下一篇:无人机航拍必看 十招教你高空构图 |

版权所有:2024厦门航空暨无人系统产业博览会组委会
联系人:潘先生 手 机/微 信:188-0182-3515
商务QQ:761199479 E-mail : 761199479@qq.com